We proposed a method for improving GPS position calculation in an urban scenario.
The method works by identifying non line of sight satellites w.r.t. a GPS antenna
using a 3D map of the environment around the measurement point.
The signals from the hidden satellites are excluded in the calculation to achieve
significant improvements in position estimation.
We tried a method to obtain the most optimal structure of a tunnel by geometric
processing: (1) Acquire a set of partial structures by static scanning, and align them by 3D
matching using edge feature (2) Fix the absolute position of the data at both ends of the tunnel
by GPS and align the rest data again.
We propose a method to detect emergency telephone indicators
in a tunnel environment by using infrared cameras for self-positioning.
The proposed method makes use of both appearance
and motion information of the target objects.
K. Ikeuchi, T. Oguchi, M. Kuwahara, S. Ono, T. Oishi, S. Kamijo, A. Mitsuyasu, K. Koide, R. Horiguchi, M. Iijima, H. Hanabusa, M. Yoshimura, Y. Kameda, K. Mori, A. Tanaka, T. Matsunuma, H. Goto, M. Hasegawa, M. Suda, S. Sasaki, K. Kishi, S. Yorozu, H. Ichiawa, D. Oshima, Y. Tamura: "8% Reduction of CO2 Emission by Raising Awareness of Citizens: Development and Evaluation of Regional Transport Information System for Promoting Eco-Friendly Travel Behavior", ITS World Congress, 2015.10
 A. Kumar, Y. Sato, T. Oishi and K. Ikeuchi, "Identifying Reflected GPS Signals and Improving Position Estimation Using 3D Map Simultaneously Built with Laser Range Scanner," 13th ITS Asia-Pacific Forum, Auckland, New Zealand, April 2014.
A. Kumar, Y. Sato, T. Oishi and K. Ikeuchi, "Identifying Reflected GPS Signals and Improving Position Estimation Using 3D Map Simultaneously Built with Laser Range Scanner," 13th ITS Asia-Pacific Forum, Auckland, New Zealand, April 2014.
 L. Xue, S. Ono, A. Banno, T. Oishi, Y. Sato, K. Ikeuchi, "Global 3D Modeling and its Evaluation for Large-Scale Highway Tunnel using Laser Range Sensor," In Proc. 19th ITS World Congress Vienna, Oct. 2012, Austria. (Best Paper Award)
L. Xue, S. Ono, A. Banno, T. Oishi, Y. Sato, K. Ikeuchi, "Global 3D Modeling and its Evaluation for Large-Scale Highway Tunnel using Laser Range Sensor," In Proc. 19th ITS World Congress Vienna, Oct. 2012, Austria. (Best Paper Award)
 Z. Wang, M. Kagesawa, S. Ono, A. Banno, T. Oishi, K. Ikeuchi, "Detection of Emergency Telephone Indicators in a Tunnel Environment," International Journal of Intelligent Transportation Systems Research, Jan. 2014.
Z. Wang, M. Kagesawa, S. Ono, A. Banno, T. Oishi, K. Ikeuchi, "Detection of Emergency Telephone Indicators in a Tunnel Environment," International Journal of Intelligent Transportation Systems Research, Jan. 2014.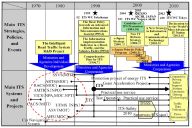 K. Koide, T. Oishi and K. Ikeuchi, "Historical Analysis of the ITS Progress of Japan," International Journal of Intelligent Transportation Systems Research, pp. 1-10, 2015.
K. Koide, T. Oishi and K. Ikeuchi, "Historical Analysis of the ITS Progress of Japan," International Journal of Intelligent Transportation Systems Research, pp. 1-10, 2015. 


