
幼児の学習の大部分は、親の行動を見て真似ることから始まります。我々 の研究室では、人間の行動を主に視覚によって観察し、これを理解して同じ行 動を再現するロボットプログラムの自動生成を研究テーマとしており、主に 「全身運動の獲得」と「手作業の獲得」の2つの課題について研究を進めてい ます。
- ヒューマノイドロボットによる伝統舞踊の獲得
- ひも結び動作の獲得
- 多指ハンドによる把持・持ち替え動作の伝達
- 組み立て作業の獲得 (APO: Assemblly Plan from Observation)
- 作業のキモの獲得
ヒューマノイドロボットによる伝統舞踊の獲得


後継者不足などにより失われつつある様々な日本の民族舞踊を後世に残す ため、舞踊の表す「動き」のモデル化について研究しています。これにより、 人間の舞踊動作を認識してコンピュータに保存し、3DCGやヒューマノイド ロボットなどで再演することが可能となります。
これまでに、「津軽じょんがら節」・「会津磐梯山踊り」の動きを計測・ 解析し、ヒューマノイドロボットによる再演を実現しています。
- 池内 克史, 中澤 篤志, 小川原 光一, 高松 淳, 工藤 俊亮, 中岡 慎一郎, 白鳥 貴亮, "民族芸能のデジタルアーカイブとロボットによる動作提示," 日本バーチャルリアリティ学会学会誌, Vol. 9, No. 2, pp. 14-20, 2004.
- Shinichiro Nakaoka, Atsushi Nakazawa, Kazuhito Yokoi, Katsushi Ikeuchi, "Leg Motion Primitives for a Dancing Humanoid Robot," IEEE 2004 International Conference on Robotics and Automation, 2004年4月
ひも結び動作の獲得
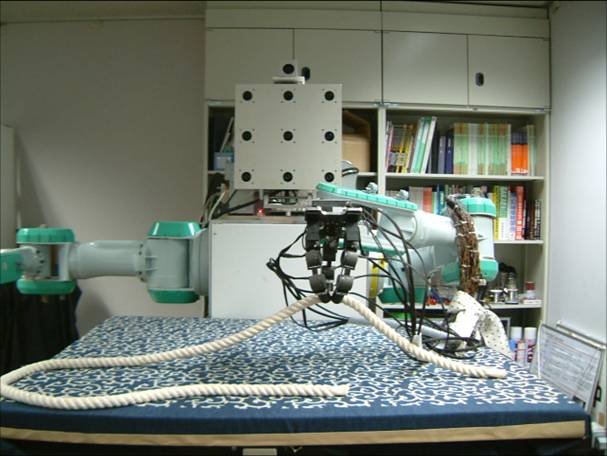
布で物を包む・ひもで結ぶなど、日常には柔軟物を扱う機会が数多く存在 します。我々は、ロボットに柔軟物の扱いを獲得させる試みの一環として、 「ひも結び動作」の獲得に着目しています。
任意の閉じたひもの結び目は、「ひも理論」により3種類の操作の組合わ せで実現可能なことがしられており、これにひもの端点の交差を実現する操作 を加えることによって、任意のひも結びをシンボリックに記述することが可能 になります。現在、(1)ロボットの視覚画像を用いひも結びのお手本動作をシ ンボリックな表現に変換する方法、(2)シンボリックな表現からロボットの動 作を生成する方法、について研究を進めています。
- Takuma Morita, Jun Takamatsu, Koichi Ogawara, Hiroshi Kimura, Katsushi Ikeuchi, "Knot Planning from Observation," Proc. IEEE Int. Conf. on Robotics and Automations (ICRA), pp.3887-3892, Sep. 2003. (台湾)
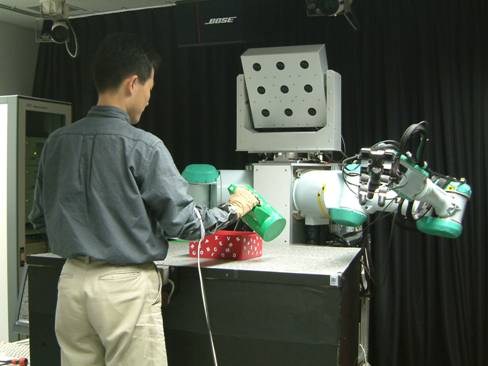
多指ハンドによる把持・持ち替え動作の伝達


日常の動作をロボットに伝達するときには、物の動きの情報のみではなく、 多指ハンドによって物をどのように掴み操るのかという情報も重要になります。 作業療法士による日常の把持の分類分けの知見によると、日常の把持は目的に 応じて大きく3つに分類されます。
- 「物を安定に支えるための把持」(例:ハンマーを握る)
- 「物を器用に操作するための把持」(例:針をつまむ)
- 「安定と操作の両立を目的とした把持」(例:鉛筆を握る)
これらは、さらに計14種類に分類され、これを用い て物体操作を握り方の側面からシンボリックに表現することが可能になります。
我々は、人間の操りを、触覚センサを分布させたデータグローブと隠れマ ルコフモデルによって把持プリミティブ列に自動認識する手法を開発し、また これらプリミティブ列からロボットの持ち替え動作を生成する研究を進めてい ます。
- Keni Bernardin, Koichi Ogawara, Katsushi Ikeuchi, Ruediger Dillmann, "A Sensor Fusion Approach for Recognizing Continuous Human Grasping Sequences Using Hidden Markov Models," IEEE Transactions on Robotics, Vol. 21, No. 1, pp 47-57, 2005.
組み立て作業の獲得 (APO: Assemblly Plan from Observation)
剛体同士の組み立て作業は、物体同士の接触状態遷移の連続形として記述 することができます。我々は、この接触状態遷移の種類が有限個であることを 証明し、これをプリミティブ動作とすることで、視覚から得られる組み立て作 業をプリミティブ列として認識し、またこれから同じ組み立て作業を再生する 手法を提案しています。
- 高松 淳, 小川原 光一, 木村 浩, 池内 克史, "ロボットによ る実行を目的とした人の組み立て作業の理解 -接触状態遷移からの最適軌道の 生成-," 日本ロボット学会誌, Vol. 22, No. 6, pp. 62-73, 2004.
作業のキモの獲得
ロボットが人間の動作を観察しそこから動作を獲得するためには、一連の 動作の中で、どの部分重要であり模倣するべきなのかを知る必要があります。 我々は、本質的には同じである動作を表現形を変えて(物体の配置や不必要な 動作を変える)複数回実演し、ここから共通部分を抽出することによって、そ の作業を達成する上で「キモ」となる動作を自動抽出する方法を開発しました。
- Koichi Ogawara, Jun Takamatsu, Hiroshi Kimura, Katsushi Ikeuchi, "Extraction of Essential Interactions Through Multiple Observations of Human Demonstrations," IEEE Trans. on Industrial Electronics, Vol. 50, No. 4, pp.667-675, 2003.
- 小川原 光一, 高松 淳, 木村 浩, 池内 克史, "複数教示動作の時系列上での統合に基づく人間作業のモデル化手法," 情報処理学会論文誌コンピュータビジョンとイメージメディア, Vol. 43, No. SIG 4, pp.117-126, 2002.
池内研究室ホームページ:http://www.cvl.iis.u-tokyo.ac.jp/index.html
Ikeuchi Lab, The University of Tokyo, 2005