研究内容
Last Updated: 2000. 4.18
1999 - 2000
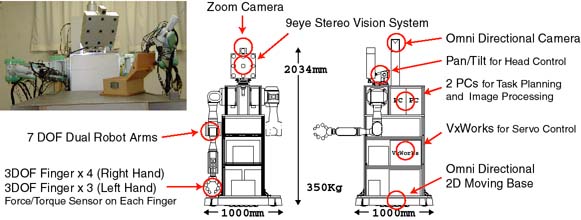
人間行動観察ロボットの開発
作業レベル(Task Level.高次)の人間行動の獲得
行動レベル(Behavior Level.低次)の人間行動の獲得
人間行動観察ロボットの開発(1999年度に終了)
作業レベル(Task Level.高次)の人間行動の獲得
作業レベル(Task Level.高次)の人間行動の獲得
空間方向での注視点解析
ロボットは、人間の実演を視覚等のセンサを用いて観察する
低処理コストのセンサ(データグローブ等)の入力より、粗い手作業モデルを構築する
ロボットは、
注視点(Attention Point)
(AP) を決定する。
注視点とは、行動をモデル化する上で注意深い解析が必要な個所を指す
高処理コストのセンサ(ステレオビジョン)を用いて、注視点付近での被操作物体の形状・精密な軌道を 3DTM 等の手法によって解析し物体の情報を獲得する
AP 解析によって、非平衡に精細な作業モデルを生成
作業モデルは適切に抽象化されているため、異なる環境下においてロボットは人間と同じ作業を再演可能
実験
認識
再演
行動レベル(Behavior Level.低次)の人間行動の獲得
Robot observes a motion of each assembly object with 9eye stereo vision
It obtains the transitions of topological contact relation.
It analyzes each contact relation by DOF (dimension of freedom) analysis.
In each transition, it assigns a basic assembly operation called "sub-skill" from the transition of DOF.
It performs the same assembly task by operating appropriate sub-skills sequentially.
Copyright (C) 1999 University of Tokyo "IKEUCHI lab." All right reserved.
 研究内容
研究内容