 研究テーマ
研究テーマ

Last Updated: 2001.6.7
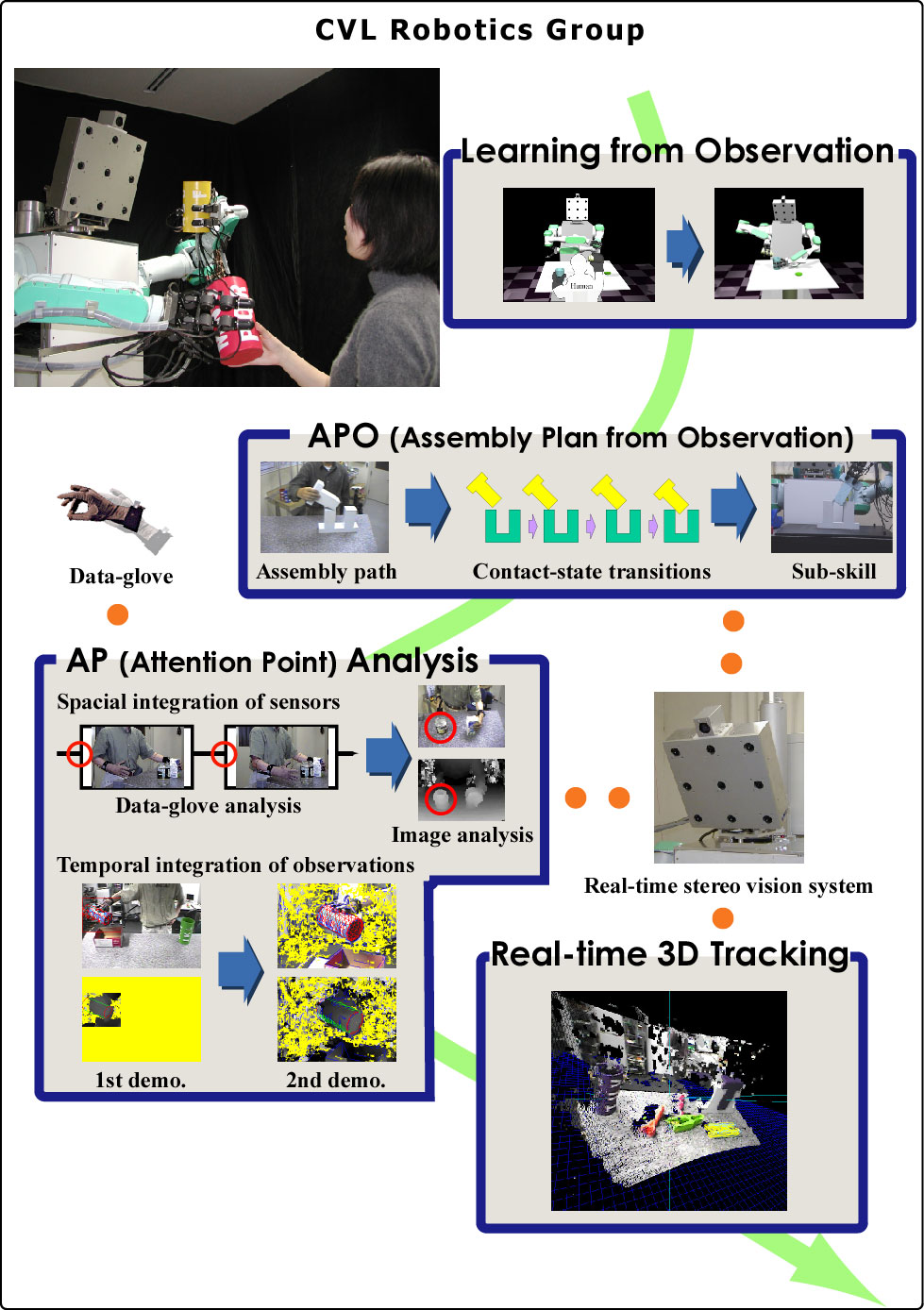
Learning from Observation
APO(Assembly Plan from Observation)
- 凸多面体で構成される組み立て作業を接触状態の遷移に着目して解析する。
- 3次元トラッキングによって、操作物体の軌道を得る。
- 軌道から環境物体との接触状態の変化を解析し、有限な接触状態遷移の形で作業を記述する。
- 異なる接触状態に変化させるロボットの行動(Sub-skill)を各状態変化に割り付けることで、ロボットの動作を生成する。
AP(Attention Point) Analysis
- 注視点を提唱:「作業の観察においてより詳細な解析を必要とする部分(時間・場所)」
- 注視点をキーに、作業を段階的かつ局所的に精度の異なる解析を行うことで、効率の良いモデル化を行う
- 空間上に分散したセンサ群の統合
初段:いくつかの計算コストの低いセンサ(例データグローブ)を使用して全体の大まかな作業モデルを生成し、注視点を抽出する。処理しないセンサについては、データを記録しておく。
次段以降:注視点付近の他のセンサ(例ステレオ画像)のデータを取りだして重点的に解析し、局所的に重みの異なる作業モデルを生成する。
- 時間上に分散した観察情報の統合
1回目の観測:センサ(例ステレオビジョン)を作業全体を観察するように調整(ズーム1倍・粗いモデル)し、大まかな作業モデルを生成し、注視点を抽出する。
2回目の観測以降:同じセンサ(例ステレオビジョン)をパラメータを変更して(ズーム2倍・細かいモデル)使い、注視点付近を重点的に解析し、局所的に重みの異なる作業モデルを生成する。
Real-time 3D Tracking
- 実時間ステレオビジョン (30fps, 280x200 pixels) を用い、3次元空間での物体の位置・姿勢の同定を 3DTM(3D Template Matching) を使用して高速に行う。
 Our mail address: robo@cvl.iis.u-tokyo.ac.jp
Our mail address: robo@cvl.iis.u-tokyo.ac.jp
Copyright (C) 1999-2001 University of Tokyo "IKEUCHI
lab." All right reserved.