Visibility Enhancement of Lesion Regions in Chest X-Ray Images With Image Fidelity Preservation
This study proposes a chest X-ray image enhancement framework for enhancing lesion visibility while preserving image features to aid a physician’s diagnosis. The proposed method predicts the image processing parameters that enhance the lesion signals via the inference neural network. The experiments show that after the proposed method was trained on 2000 images, it improved lesion visibility with an acceptable fidelity loss. We also performed pairwise comparisons and confirmed that trade-offs between fidelity loss and visibility gain were attained.

LiDAR-camera Calibration using Intensity Variance Cost
We propose an extrinsic calibration method for LiDAR-camera fusion systems using variations in intensities projected from camera images to the LiDAR point cloud. Given image sequence, LiDAR point sequence, and camera motion, the variations in the projected intensities at each point are large in the presence of errors in the estimated motion or calibration parameters. Our experimental results showed that the proposed method accurately performed calibrations using a camera and a sparse multi-beam LiDAR or one-dimensional LiDAR.
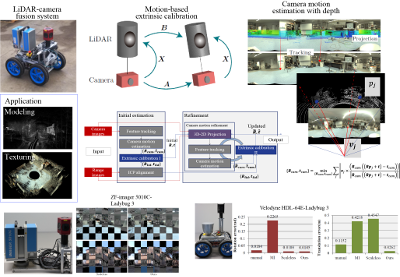
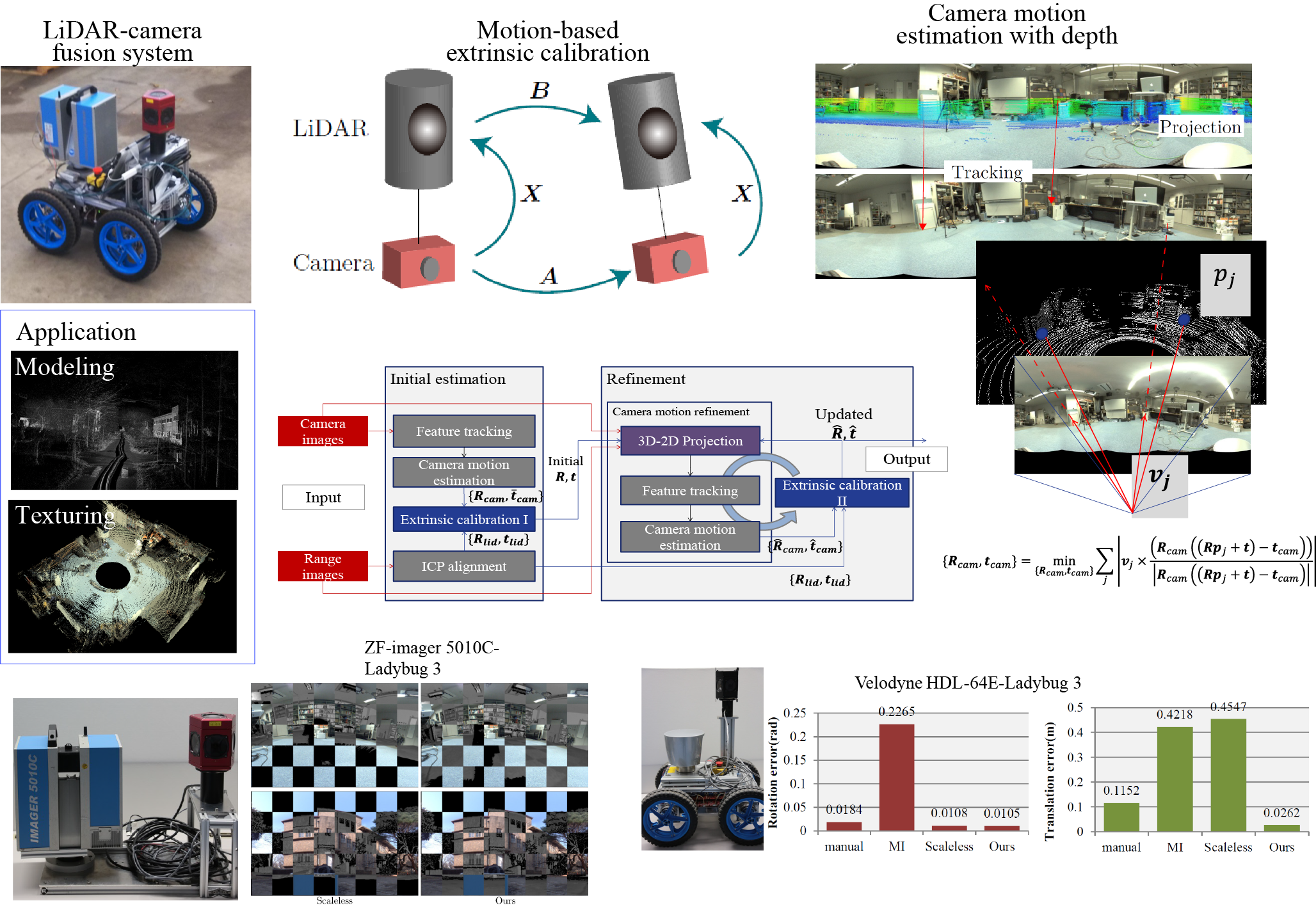
LiDAR and Camera Calibration using Motions Estimated by Sensor Fusion Odometry
An acculate camera-LiDAR calibration is required for an acculate motion estimation. Our approach extends the hand-eye calibration framework to 2D-3D calibration. The scaled camera motions are accurately calculated using a sensor-fusion odometry method. We also clarify the suitable motions for our calibration method. Whereas other calibrations require the LiDAR reflectance data and an initial extrinsic parameter, the proposed method requires only the three-dimensional point cloud and the camera image. The effectiveness of the method is demonstrated in experiments using several sensor configurations in indoor and outdoor scenes. Our method achieved higher accuracy than comparable state-of-the-art methods.
[src]
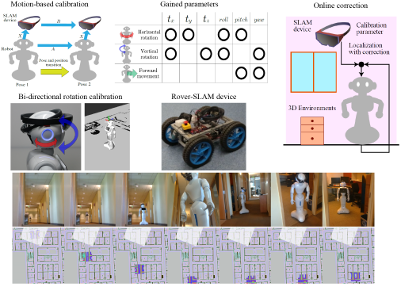
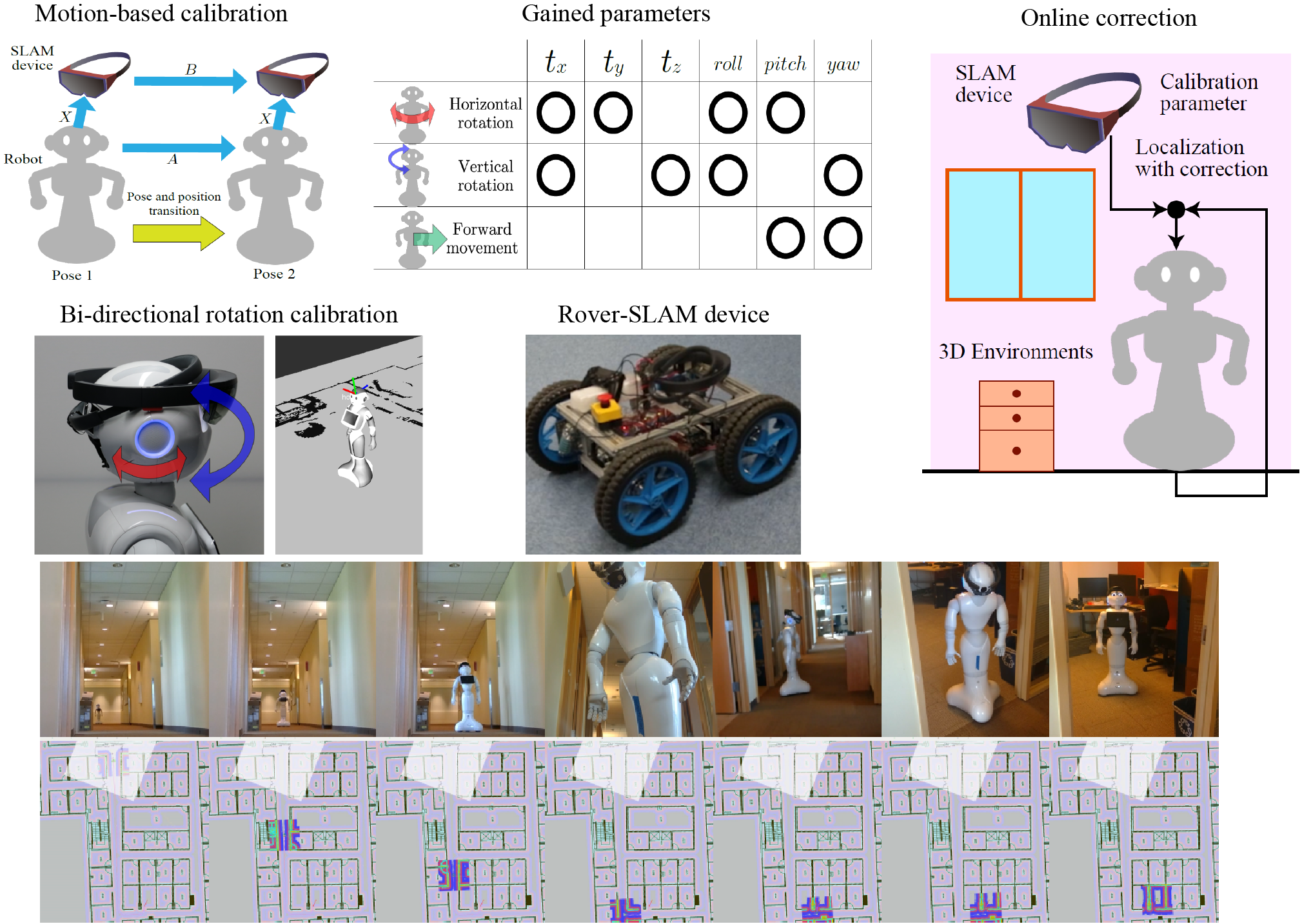
SLAM-Device and Robot Calibration for Navigation
We propose a robot-device calibration method for navigation with a device using SLAM technology like Microsoft HoloLens. The calibration is performed by using the movements given by the robot and the device. In the calibration, the most efficient way of movement is clarified according to the restriction of the robot movement. Furthermore, we also show a method to dynamically correct the position and orientation of the robot so that the information of the external environment and the shape information of the robot maintain consistency in order to reduce the dynamic error occurring during navigation. Our method can be easily used for various kinds of robots.
[src](HoloLens) [src](ROS)
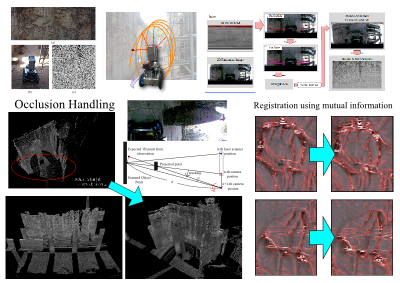
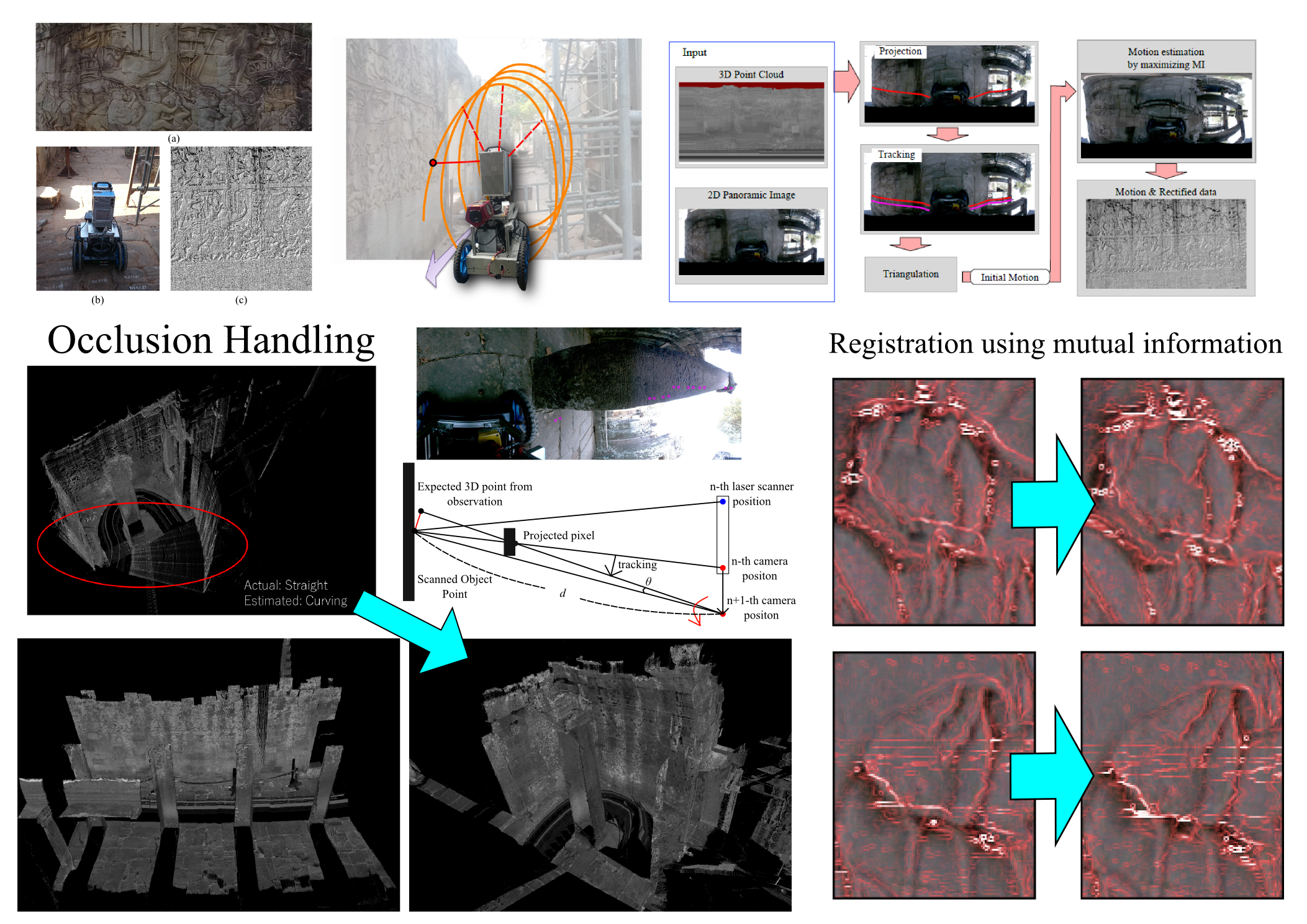
Laser Profiler and Camera Fusion System on a Rover for 3D Reconstruction
Conventional way to scan large scale structure has another problem that it is laborious and time-consuming. To accelarete to conduct large scale 3D modeling with laser scanner, we develop sensor fusion system on a rover. An omni-directional camera is mounted with laser scanner together and sensor motion is estimated with panoramic video. we introduce occlusion handling and propose the motion refinement using multi modal registration by maximizing mutual infomation in this system.
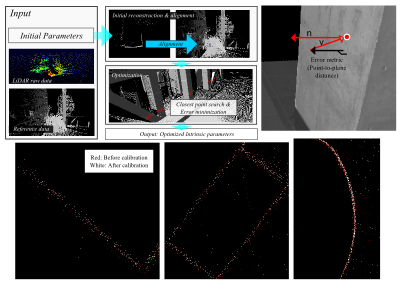
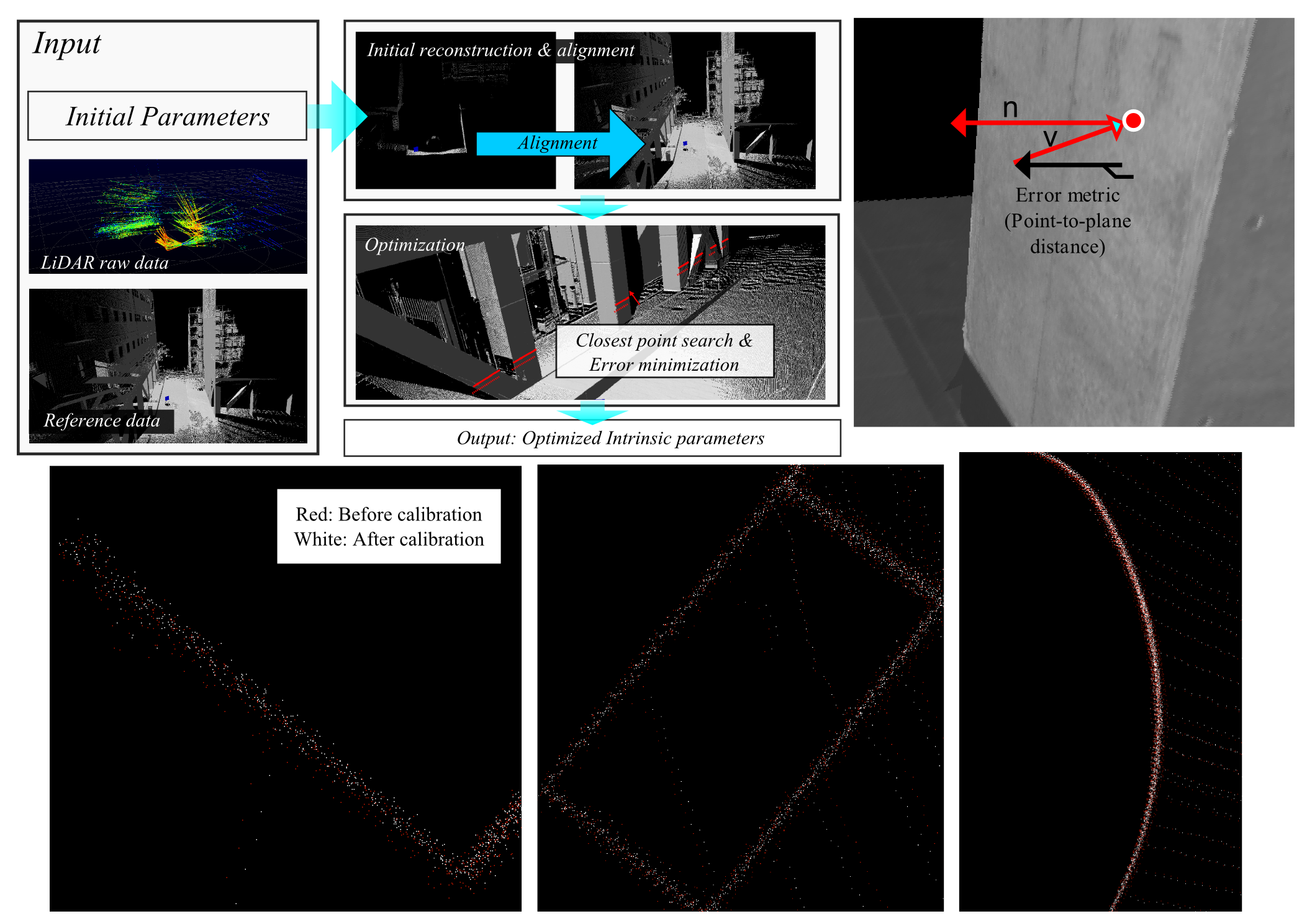
Intrinsic Parameter Calibration of LiDAR
Multi-beam LiDAR is used for many of applications such as autonomous driving, SLAM, 3D modeling, etc. Multi beam LiDAR can obtain surrounding 3D information with high frame rate. However it needs calibration between laser units and intrinsic calibration parameters provided by manufacturer are not accurate enough to using 3D modeling. To refine the intrinsic calibration parameters, we conduct alignment 3d point cloud obtained by each laser unit to more acculate reference 3D data.
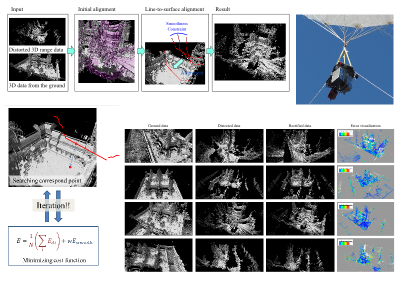
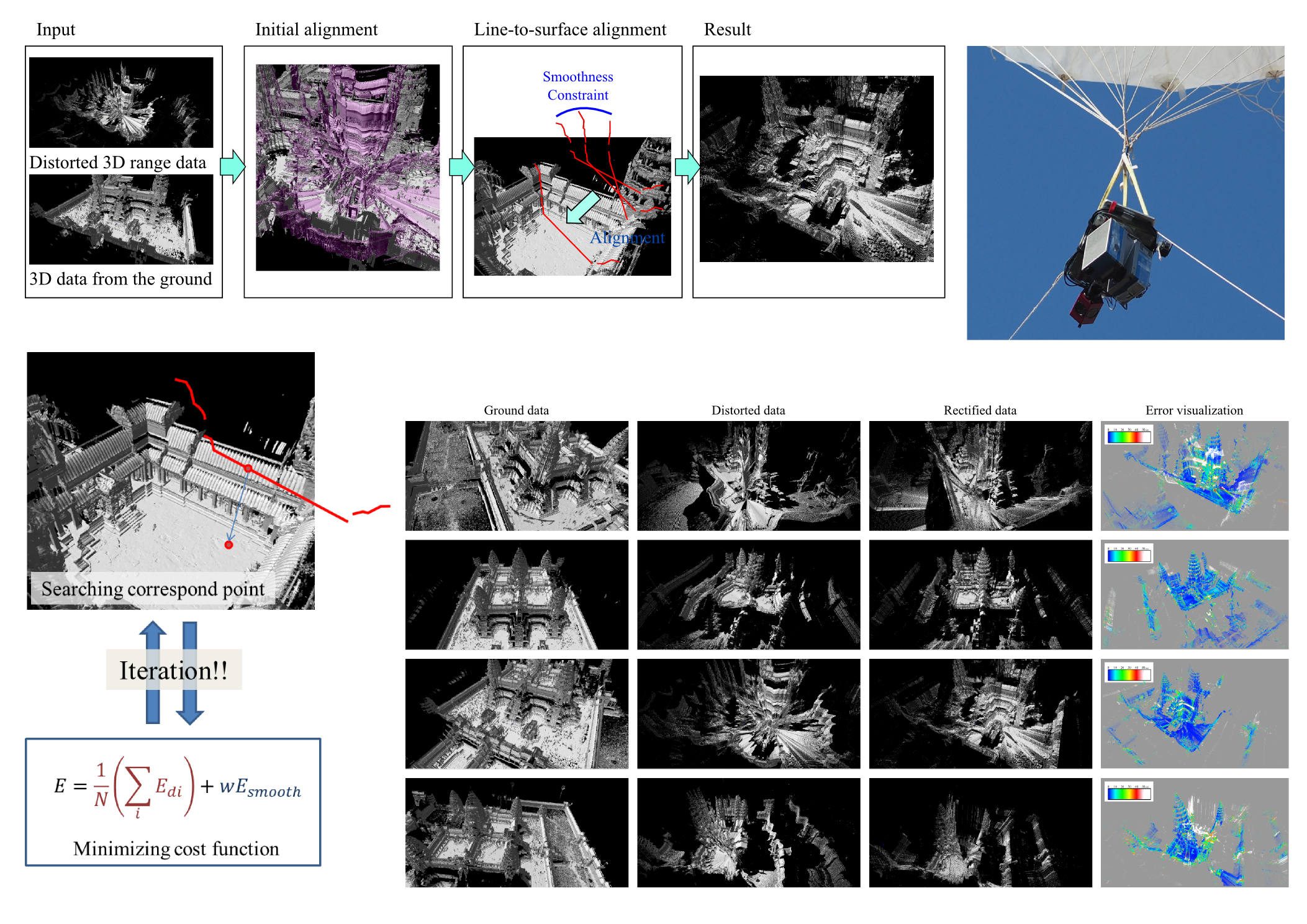
Rectification of Aerial 3D Laser Scans via Line-to-Surface Registration to Ground Model
3D digital archiving is obtaining shapes of real objects with 3D scanner and digitize them. Especially it is useful for preservation and restoration of cultural heritage assets which are exposed to risk of deterioration. However, conventional way cannot obtain enough roofs surface data. We develop balloon sensor and scan roofs from high position, and estimate motion during scanning by utilizing overlaps between aerial scans and static scans. Our method is based on ICP algorithm and introduces smoothness constraint to eliminate ambiguity.