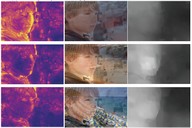
Conventional visibility models cannot reflect the dependence of the suprathreshold visibility of
the blended images on the appearance of the pre-blended image content.
Therefore, we have proposed a visibility model with a content-adaptive feature aggregation mechanism,
which integrates the visibility for each image feature (i.e., such as spatial frequency and colors)
after applying weights that are adaptively determined according to the appearance of the input image.
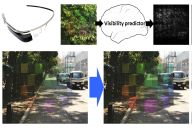
There are many situations in which virtual objects are presented
half-transparently on a background in real time applications.
In such cases, we often need to show the object with constant
visibility.
To overcome this problem, we present a framework for blending
images based on a subjective metric of visibility. In our method, a
blending parameter is locally and adaptively optimized so that
the visibility of each location achieves the targeted level.
In outdoor Mixed Reality (MR), objects distant from the observer
suffer from an effect called aerial perspective that fades the color
of the objects and blends it to the environmental light color.
We present a turbiditybased
method for rendering a virtual object with aerial perspective
effect in a MR application.
We present an alternative method for solving the motion
stereo problem for two views in a variational framework.
Instead of directly solving for the depth, we simultaneously
estimate the optical flow and the 3D structure by minimizing
a joint energy function consisting of an optical flow constraint
and a 3D constraint.
We propose a novel omnidirectional video completion framework based on depth estimation.
First, we recover the depth of the scene from a pixel motion model constrained by a known camera pose.
The proposed approach further improves the depth map by a structure-aware refinement.
We can employ the refined depth for color propagation into the holes.
We propose a novel occlusion handling method for real-time mixed-reality
given a monocular image and an inaccurate depth map.
We modify the intensity of the overlayed CG object based on
the texture of the underlying real scene using visibility-based rendering.
To determine the appropriate level of visibility,
we use CNN-based semantic segmentation and assign labels to the real scene
based on the complexity of object boundary and texture.
One of the challenges in mixed reality (MR) applications is
handling contradictory occlusions between real and virtual objects.
We proposed a solution to the occlusion problem
that does not require precise foreground-background segmentation.
In our method, a virtual object is blended with a real scene
so that the virtual object can be perceived as being behind the foreground region.
Outdoor environment makes the occlusion handling difficult due to the unpredictable illumination changes.
We proposed an outdoor illumination constraints for resolving the foreground occlusion
problem in outdoor environment.
In addition, we introduce an effective method to resolve the shadow occlusion problem
by using shadow detection and recasting with a spherical vision camera.
A robust image-based alignment method to be used in outdoor
environments is proposed.
In the proposed method, the albedo of real objects is estimated
using 3D shapes of these objects in advance,
and the appearance is reproduced from the albedo and current light
environment. The appearance of real objects and reproduced image
becomes close, so a robust image-based alignment is achieved.
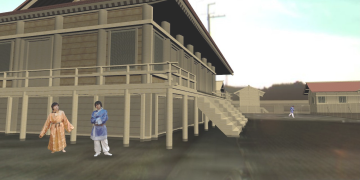
We developed Mixed Reality (MR) contents that reconstructed the ancient capital of Asuka-Kyo and applied a fast shading and
shadowing method that used shadowing planes. We conducted a subjective evaluation experiment with Head Mounted Display,
which showed that displaying these contents increased the audience's knowledge of both Asuka-Kyo and MR technologies. We also
conducted impression evaluation tests with and without shading and shadowing.
 T. Fukiage and T. Oishi,
"A Content-Adaptive Visibility Predictor for Perceptually Optimized Image Blending,"
ACM Transactions on Applied Perception,
20, 1, Article 3 (January 2023).
[sup]
[video]
T. Fukiage and T. Oishi,
"A Content-Adaptive Visibility Predictor for Perceptually Optimized Image Blending,"
ACM Transactions on Applied Perception,
20, 1, Article 3 (January 2023).
[sup]
[video]
 T. Fukiage, T. Oishi, K. Ikeuchi,
"Visibility-Based Blending for Real-Time Applications,"
In Proc. 12th IEEE International Symposium on Mixed and Augmented Reality (ISMAR 2014), pp. 63-72, Munich, Sept. 2014.
[video]
T. Fukiage, T. Oishi, K. Ikeuchi,
"Visibility-Based Blending for Real-Time Applications,"
In Proc. 12th IEEE International Symposium on Mixed and Augmented Reality (ISMAR 2014), pp. 63-72, Munich, Sept. 2014.
[video]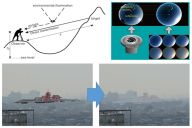
 M. Roxas and T. Oishi, "Real-Time Simultaneous 3D Reconstruction and Optical Flow Estimation," in Proc. IEEE Winter Conf. on Applications of Computer Vision (WACV 2018), Mar. 2018.
[src]
M. Roxas and T. Oishi, "Real-Time Simultaneous 3D Reconstruction and Optical Flow Estimation," in Proc. IEEE Winter Conf. on Applications of Computer Vision (WACV 2018), Mar. 2018.
[src]
 C. Morales, S. Ono, Y. Okamoto, M. Roxas, T. Oishi and K. Ikeuchi, "Outdoor Omnidirectional Video Completion via Depth Estimation by Motion Analysis," in Proc. International Conference on Pattern Recognition (ICPR 2016), 2016.
C. Morales, S. Ono, Y. Okamoto, M. Roxas, T. Oishi and K. Ikeuchi, "Outdoor Omnidirectional Video Completion via Depth Estimation by Motion Analysis," in Proc. International Conference on Pattern Recognition (ICPR 2016), 2016.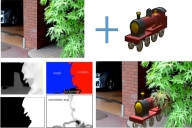 M. Roxas, T. Hori, T. Fukiage, Y. Okamoto, T. Oishi,
"Occlusion Handling using Semantic Segmentation and Visibility-Based Rendering for Mixed Reality,"
ACM Symposium on Virtual Reality Software and Technology(VRST 2018).
[video]
M. Roxas, T. Hori, T. Fukiage, Y. Okamoto, T. Oishi,
"Occlusion Handling using Semantic Segmentation and Visibility-Based Rendering for Mixed Reality,"
ACM Symposium on Virtual Reality Software and Technology(VRST 2018).
[video]
 T. Fukiage, T. Oishi, and K. Ikeuchi,
"Reduction of contradictory partial occlusion in mixed reality by using characteristics of transparency perception,"
In Proc. 10th IEEE International Symposium on Mixed and Augmented Reality (ISMAR 2012), pp. 129-139, , 2012.
T. Fukiage, T. Oishi, and K. Ikeuchi,
"Reduction of contradictory partial occlusion in mixed reality by using characteristics of transparency perception,"
In Proc. 10th IEEE International Symposium on Mixed and Augmented Reality (ISMAR 2012), pp. 129-139, , 2012.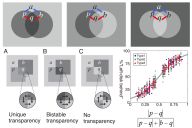 T. Fukiage, T. Oishi, and K. Ikeuchi,
"A simple photometric factor in perceived depth order of bistable transparency patterns,"
Journal of Vision, 14(5): 2, May 5 2014.
T. Fukiage, T. Oishi, and K. Ikeuchi,
"A simple photometric factor in perceived depth order of bistable transparency patterns,"
Journal of Vision, 14(5): 2, May 5 2014. L. B. Vinh, T. Kakuta, R. Kawakami, T. Oishi, K. Ikeuchi, "Foreground and Shadow Occlusion Handling for Outdoor Augmented Reality," In Proc. 9th IEEE International Symposium on Mixed and Augmented Reality (ISMAR 2010), pp. 109-118, 13-16 Oct. 2010, Seoul.
[video]
L. B. Vinh, T. Kakuta, R. Kawakami, T. Oishi, K. Ikeuchi, "Foreground and Shadow Occlusion Handling for Outdoor Augmented Reality," In Proc. 9th IEEE International Symposium on Mixed and Augmented Reality (ISMAR 2010), pp. 109-118, 13-16 Oct. 2010, Seoul.
[video] T. Kakuta, , L. B. Vinh, R. Kawakami, T. Oishi, K. Ikeuchi, "Detection of Moving Objects and Cast Shadows Using a Spherical Vision Camera for Outdoor Mixed Reality," ACM Symp. on Virtual Reality Software and Technology (VRST 2008), Oct. 2008, pp. 219-222.
T. Kakuta, , L. B. Vinh, R. Kawakami, T. Oishi, K. Ikeuchi, "Detection of Moving Objects and Cast Shadows Using a Spherical Vision Camera for Outdoor Mixed Reality," ACM Symp. on Virtual Reality Software and Technology (VRST 2008), Oct. 2008, pp. 219-222.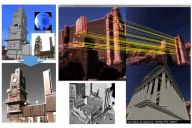 M. Inaba, A. Banno, T. Oishi, K. Ikeuchi, "Achieving Robust Alignment for Outdoor Mixed Reality using 3D Range Data," In Proc. 18th ACM Symp. on Virtual Reality Software and Technology (VRST 2012), pp. 61-68, Dec. 2012, Toronto, Canada.
M. Inaba, A. Banno, T. Oishi, K. Ikeuchi, "Achieving Robust Alignment for Outdoor Mixed Reality using 3D Range Data," In Proc. 18th ACM Symp. on Virtual Reality Software and Technology (VRST 2012), pp. 61-68, Dec. 2012, Toronto, Canada. T. Kakuta, T. Oishi, K. Ikeuchi,
"Development and Evaluation of Asuka-Kyo MR Contents with Fast Shading and Shadowing,"
Proc. Int. Society on Virtual Systems and MultiMedia (VSMM 2008), pp.254-260, Oct. 2008.
T. Kakuta, T. Oishi, K. Ikeuchi,
"Development and Evaluation of Asuka-Kyo MR Contents with Fast Shading and Shadowing,"
Proc. Int. Society on Virtual Systems and MultiMedia (VSMM 2008), pp.254-260, Oct. 2008.  T. Kakuta, T. Oishi, K. Ikeuchi,
"Virtual Kawaradera: Fast Shadow Texture for Augmented Reality," Proc. the Tenth International Conference on Virtual System and Multimedia (VSMM 2004), pp. 141-150, November 2004.
T. Kakuta, T. Oishi, K. Ikeuchi,
"Virtual Kawaradera: Fast Shadow Texture for Augmented Reality," Proc. the Tenth International Conference on Virtual System and Multimedia (VSMM 2004), pp. 141-150, November 2004.